
Open3D
Intel RealSense with Open3D
Open3D is an open-source library that supports rapid
development of software for 3D data processing, including scene reconstruction,
visualization and 3D machine learning.
Intel RealSense (librealsense SDK 2.0) is integrated into Open3D (v0.12+) and you can
use it through both C++ and Python APIs without a separate librealsense SDK
installation on Linux, macOS and Windows. Older versions of Open3D support
Intel RealSense through a separate install of librealsense SDK 1.0 and pyrealsense.
Location on GitHub here
Obtaining Open3D with Intel RealSense support
Please refer to Open3D
documentation for more
details such as:
- Obtaining Open3D source code and building from source.
- Building C++ projects using the Open3D library.
- Tutorials and examples.
- C++ and Python API documentation.
Python
Install Open3D from PyPI (a virtual environment is recommended):
pip install open3d
Compile from source (C++)
To build Open3D from source with Intel RealSense support, set
BUILD_LIBREALSENSE=ON at CMake config step. You can add other
configuration options as well (e.g.: BUILD_GUI=ON and
BUILD_PYTHON_MODULE=ON may be useful).
cmake -D BUILD_LIBREALSENSE=ON -D <OTHER_FLAGS> /path/to/Open3D/source/
Reading from Intel RealSense bag files
Sample Intel RealSense bag files
You con download sample Intel RealSense bag datasets with this script (in the Open3D repository):
python examples/python/reconstruction_system/scripts/download_dataset.py L515_test
Check the script for more RS bag datasets.
Here is a C++ code snippet that shows how to read an Intel RealSense bag file
recorded with Open3D or the realsense-viewer. Note that general ROSbag
files are not supported. See more details and available functionality
(such as getting timestamps, aligning the depth stream to the color
stream and getting intrinsic calibration) in the C++ API in the
RSBagReader
documentation
#include <open3d/Open3D.hpp>
using namespace open3d;
t::io::RSBagReader bag_reader;
bag_reader.Open(bag_filename);
auto im_rgbd = bag_reader.NextFrame();
while (!bag_reader.IsEOF()) {
// process im_rgbd.depth_ and im_rgbd.color_
im_rgbd = bag_reader.NextFrame();
}
bag_reader.Close();
Here is the corresponding Python code. The Python API has equivalent functionality:
import open3d as o3d
bag_reader = o3d.t.io.RSBagReader()
bag_reader.open(bag_filename)
im_rgbd = bag_reader.next_frame()
while not bag_reader.is_eof():
# process im_rgbd.depth and im_rgbd.color
im_rgbd = bag_reader.next_frame()
bag_reader.close()
Examples
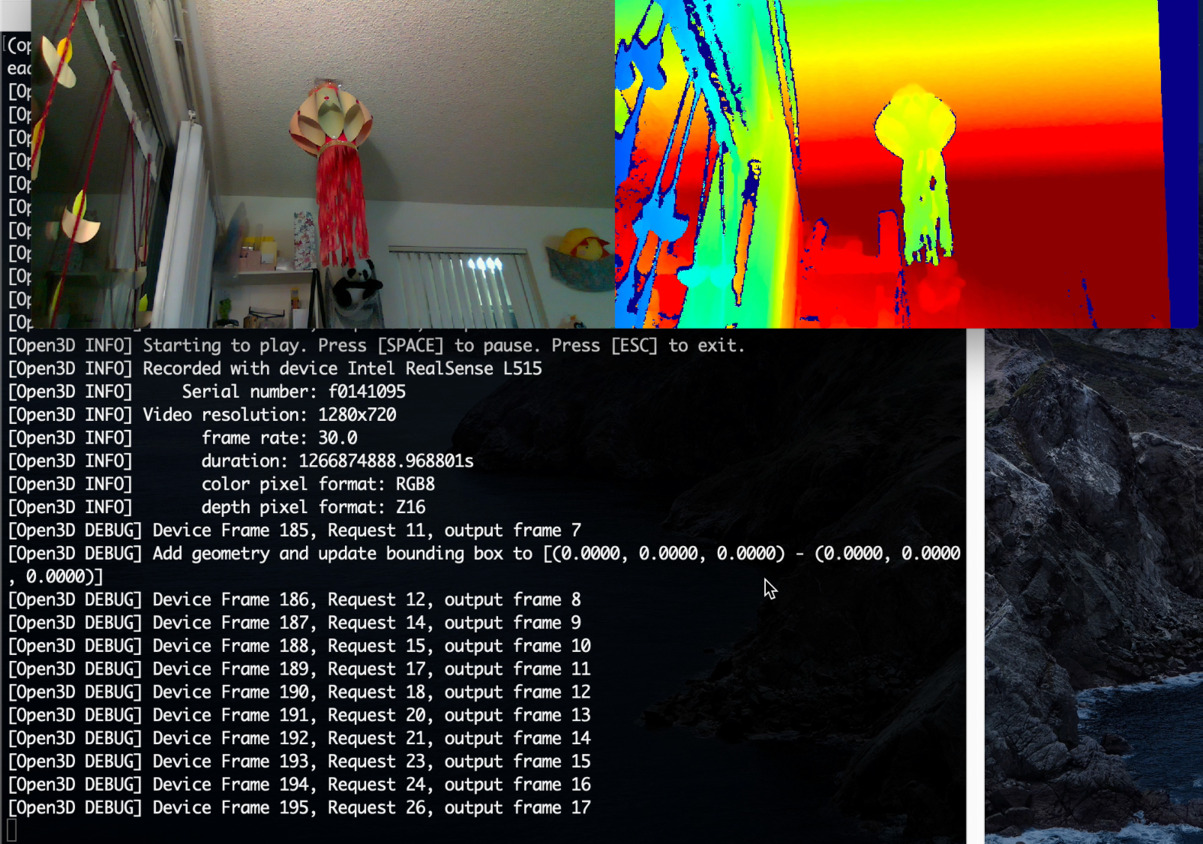
C++ RS bag file viewer
This C++ example that plays back the color and depth streams from an Intel
RealSense bag file. It also prints out metadata about the video streams
in the file. Press [SPACE] to pause/resume and [ESC] to exit.:
make RealSenseBagReader
wrappers/open3d/RealSenseBagReader --input L515_test.bag
Running the Open3D scene reconstruction pipeline
You can provide an RS bag file directly to the reconstruction pipeline (part of the Open3D Python
examples) and colormap optimization pipelines. It will be automatically converted to a directory of
depth and color frames and the camera intrinsics. Edit the
examples/python/reconstruction_system/config/realsense.json file with the path to your RS bag file
and leave path_intrinsic empty. Update other configuration parameters if needed (see the
reconstruction pipeline documentation for more details, including other required packages):
cd examples/python/reconstruction_system/
python run_system.py --make --register --refine --integrate config/realsense.json
python ../pipelines/color_map_optimization_for_reconstruction_system.py --config config/realsense.json
The reconstruction result below was obtained with the L515_JackJack
dataset with the configuration changes:
"path_dataset": "/path/to/downloaded/L515_JackJack.bag"
"max_depth": 0.85,
"tsdf_cubic_size": 0.75,
"voxel_size": 0.025,
"max_depth_diff": 0.03
Scene reconstruction sample result with Intel RealSense bag input data
Intel RealSense camera configuration, live capture, processing and recording
Intel RealSense camera discovery
You can list all Intel RealSense devices connected to the system and get their
capabilities (supported resolutions, frame rates, etc.) with the code
snippet below.
#include <open3d/Open3D.hpp>
open3d::t::io::RealSenseSensor::ListDevices();
import open3d as o3d
o3d.t.io.RealSenseSensor.list_devices()
Here is sample output when only one L515 camera is connected:
[Open3D INFO] [0] Intel RealSense L515: f0141095
[Open3D INFO] color_format: [RS2_FORMAT_BGR8 | RS2_FORMAT_BGRA8 | RS2_FORMAT_RGB8 | RS2_FORMAT_RGBA8 | RS2_FORMAT_Y16 | RS2_FORMAT_YUYV]
[Open3D INFO] color_resolution: [1280,720 | 1920,1080 | 960,540]
[Open3D INFO] color_fps: [15 | 30 | 6 | 60]
[Open3D INFO] depth_format: [RS2_FORMAT_Z16]
[Open3D INFO] depth_resolution: [1024,768 | 320,240 | 640,480]
[Open3D INFO] depth_fps: [30]
[Open3D INFO] visual_preset: [RS2_L500_VISUAL_PRESET_CUSTOM | RS2_L500_VISUAL_PRESET_DEFAULT | RS2_L500_VISUAL_PRESET_LOW_AMBIENT | RS2_L500_VISUAL_PRESET_MAX_RANGE | RS2_L500_VISUAL_PRESET_NO_AMBIENT | RS2_L500_VISUAL_PRESET_SHORT_RANGE]
[Open3D INFO] Open3D only supports synchronized color and depth capture (color_fps = depth_fps).
This data can also be obtained programmatically to configure a camera
based on custom specifications (e.g.: resolution less than 720p) and to
independently configure multiple cameras.
Intel RealSense camera configuration
Intel RealSense cameras can be configured with a simple json configuration
file. See Intel RealSense
documentation
for the set of configuration values. Supported configuration options
will be depend on the device and other chosen options. Here are the
options supported by Open3D:
- serial: Pick a specific device, leave empty to pick the first
available device. - color_format: Pixel format for color frames.
- color_resolution: (width, height): Leave 0 to let Intel RealSense
pick a supported width or height. - depth_format: Pixel format for depth frames.
- depth_resolution: (width, height): Leave 0 to let Intel RealSense
pick a supported width or height. - fps: Common frame rate for both depth and color streams. Leave 0
to let Intel RealSense pick a supported frame rate. - visual_preset: Controls depth computation on the device.
Supported values are specific to product line (SR300, RS400, L500).
Leave empty to pick the default.
Here is an example json configuration file to capture 30fps, 540p
color and 480p depth video from any connected Intel RealSense camera. The
video width is picked by Intel RealSense. We also set the visual_preset to
RS2_L500_VISUAL_PRESET_MAX_RANGE to better capture far away objects.
{
"serial": "",
"color_format": "RS2_FORMAT_RGB8",
"color_resolution": "0,540",
"depth_format": "RS2_FORMAT_Z16",
"depth_resolution": "0,480",
"fps": "30",
"visual_preset": "RS2_L500_VISUAL_PRESET_MAX_RANGE"
}
Intel RealSense camera capture, processing and recording
The following code snippets show how to capture live RGBD video from a
Intel RealSense camera. They capture the first 150 frames and also record them
to an RS bag file. The bag file can be played back with Open3D tools,
realsense-viewer. You can also use ROS tools such as
rosbag,
rqt_bag and
rviz to examine, play and modify the bag
file. You can adapt the snippets to your needs by processing or
displaying the frames after capture.
#include <open3d/Open3D.hpp>
open3d::t::io::RealSenseSensorConfig rs_cfg;
open3d::io::ReadIJsonConvertible(config_filename, rs_cfg);
RealSenseSensor rs;
rs.InitSensor(rs_cfg, 0, bag_filename);
rs.StartCapture(true); // true: start recording with capture
for(size_t fid = 0; fid<150; ++fid) {
im_rgbd = rs.CaptureFrame(true, true); // wait for frames and align them
// process im_rgbd.depth_ and im_rgbd.color_
}
rs.StopCapture();
import json
import open3d as o3d
with open(config_filename) as cf:
rs_cfg = o3d.t.io.RealSenseSensorConfig(json.load(cf))
rs = o3d.t.io.RealSenseSensor()
rs.init_sensor(rs_cfg, 0, bag_filename)
rs.start_capture(True) # true: start recording with capture
for fid in range(150):
im_rgbd = rs.capture_frame(True, True) # wait for frames and align them
# process im_rgbd.depth and im_rgbd.color
rs.stop_capture()
Note that for any real time application such as live capture and
processing, it is important to complete frame processing in the frame
interval (~33ms for 30fps recording). You may experience frame drops
otherwise. For high resolution capture, you can defer frame alignment by
setting align_depth_to_color=false during capture and performing it
while reading the bag file instead.
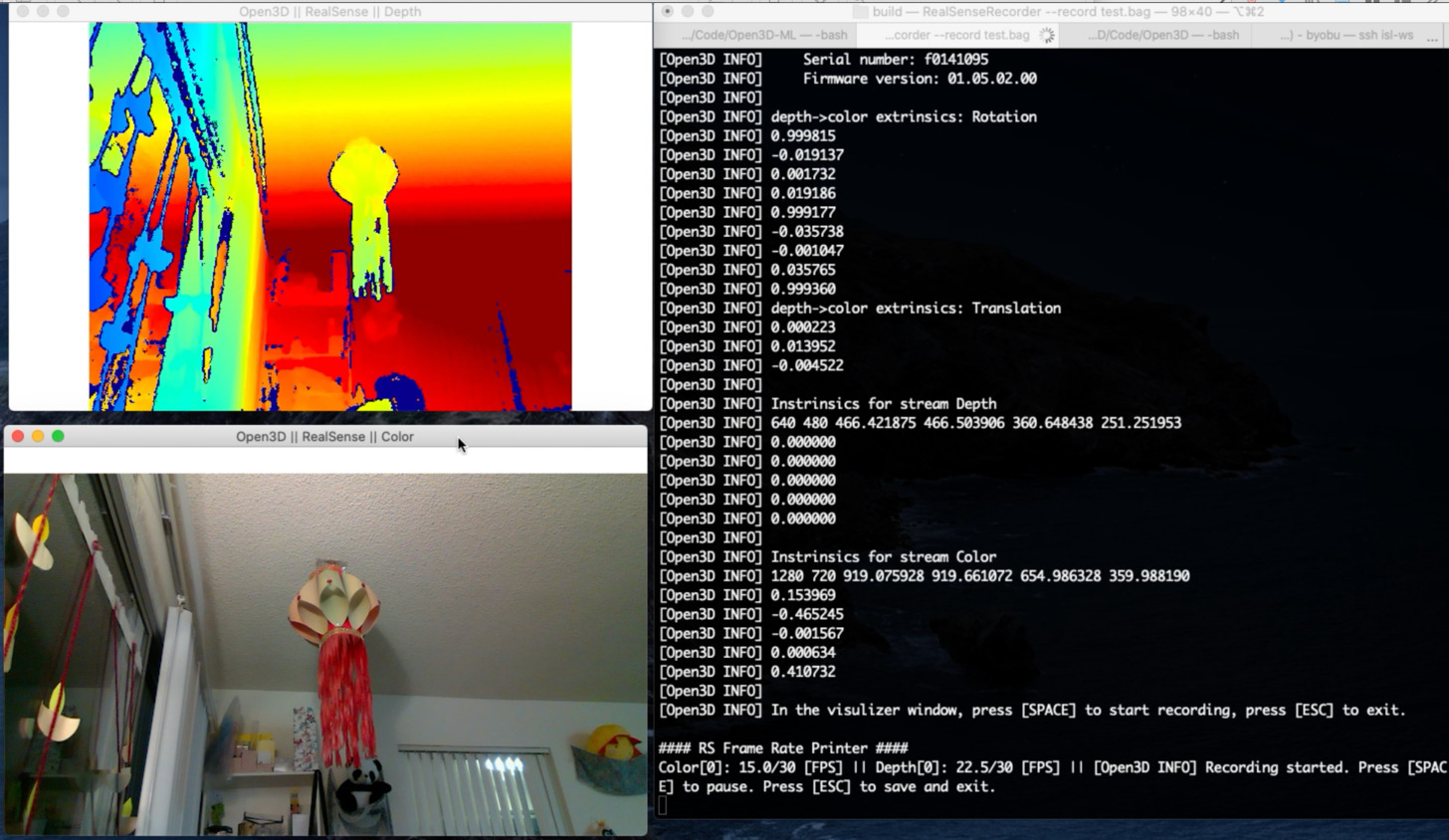
This is a complete C++ example that shows visualizing live capture and
recording to a bag file. The recording can be paused / resumed with
[SPACE]. Use [ESC] to stop capture and quit. You can use this example to
capture your own dataset:
make RealSenseRecorder
wrappers/open3d/RealSenseRecorder --config ../wrappers/open3d/rs_default_config.json --record test_data.bag
Updated about 4 years ago